Intelligent Companion & Service Robot (ICSiBot): A Robotic Research Platform

Our team at ICSI Research Group have years of experiences in mobile robot development as well as the algorithms on mobile robot such as sensing and actuators, motors and drivers, path planning and navigation algorithms, device-to-device (D2D) such as multi-robot communication, mechanical structural integrity and analysis and recent works on wireless positioning system using only WiFi in an indoor environment.
Intelligent Companion and Service roBOT (ICSiBOT) is our latest mobile robot developed by members and students of ICSI Research Group. The robot is categorized as service robot, which main goal is to serve and assist human needs. ICSiBOT is currently used as a research platform on the following research topics:
- Intelligent path planning and navigation using LIDAR sensor.
- Virtual robot face with voice recognition and emotions.
- Human detection using overhead mounted omni-directional camera.
- Data collection agent for WiFi signal fingerprinting database.
- Data collection agent for WiFi spatio-temporal data.
The research using ICSiBOT can be further explores for instance as informative mobile robot application in service industries such as hospitality, healthcare, transportation station and hubs, shopping malls and many others. Other research interests such as next-gen positioning and navigation algorithms, informative and aesthetic virtual robot face design, controller and hardware evolution, control system strategies and other. Literally everything!
Come join us, now!!
Floating Beacon: A Real-Time Water Quality & River Flow Monitoring System.
This final year project was developed by Akashah. The device is the third generation and the first generation was designed in 2019. The floating beacon is targeted to provide a real-time device location while measuring the river water quality for the agriculture sector from Timah Tasoh dam to the paddy field and etc.
Congratulations!! All The Best

Congratulations to our associate member Dr Mohd Sani Mohamad Hashim on the appointment as Programme Chairperson (Postgraduate) at Faculty of Mechanical Engineering Technology starting from 1st September 2021. Wishing you good luck and all the best. Gambatte.
EduGimbal: An Educational Purpose Gimbal System

Currently, Muhammad Amien is doing his MSc study sponsored by FRGS for this project. The gimbal system was designed from scratch. One of the system's general applications is to stabilising a system such as a drone and a camera. Next, a sliding mode control system algorithm will be implemented to the system to ensure the system's robustness against disturbances and uncertainties while maintaining the output accuracy.
Congratulations!! PhD Dual Degree Programme

Congratulations! The first intake of Ph.D. Dual Degree Programme, University Malaysia Perlis and the University of Yamanashi, Mr. Ahmad Hakimi Bin Ahmad Sa’ahiry under the supervision of Ts. Dr. Abdul Halim Ismail from UniMAP and Assoc. Prof. Dr. Toyouki Masahiro from the University of Yamanashi with the support from the JASSO Student Exchange Support Programme for a period of 1 year.
Research Title:
Indoor Localization based on Organic Fingerprinting
Bulletin Board


In the Spotlight
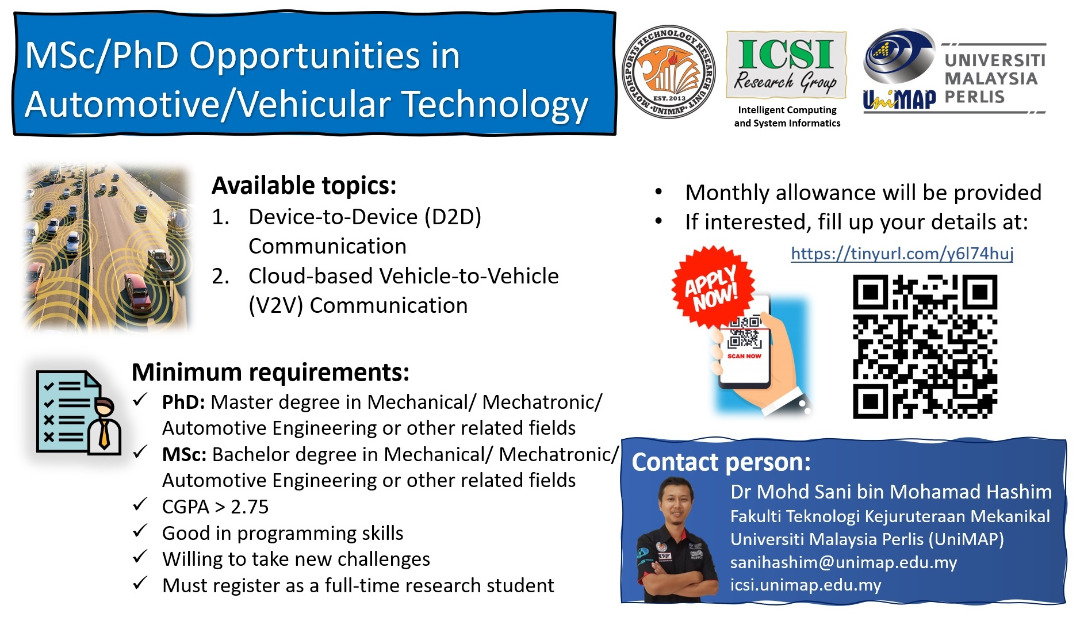
Vehicular Technology
Robotics & AI
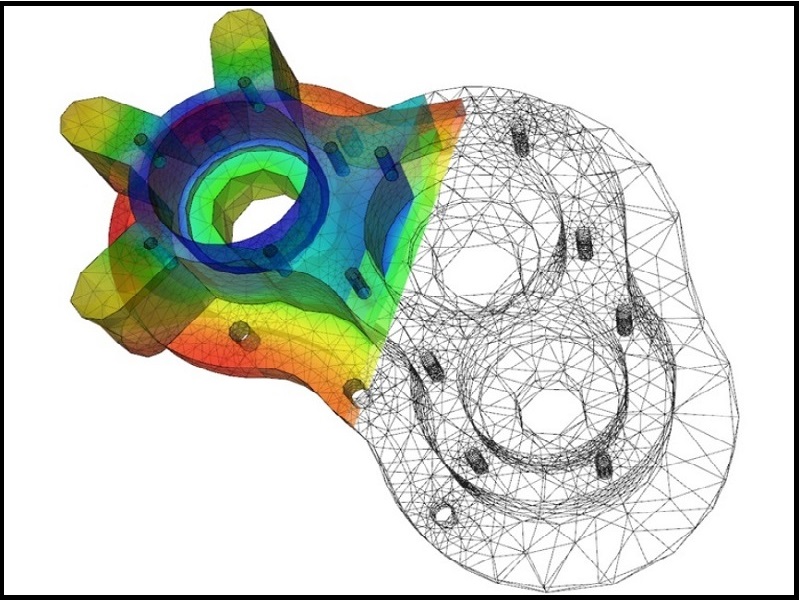
Computational Mechanics

Control Systems & Optimization

Embedded System & Renewable Energy
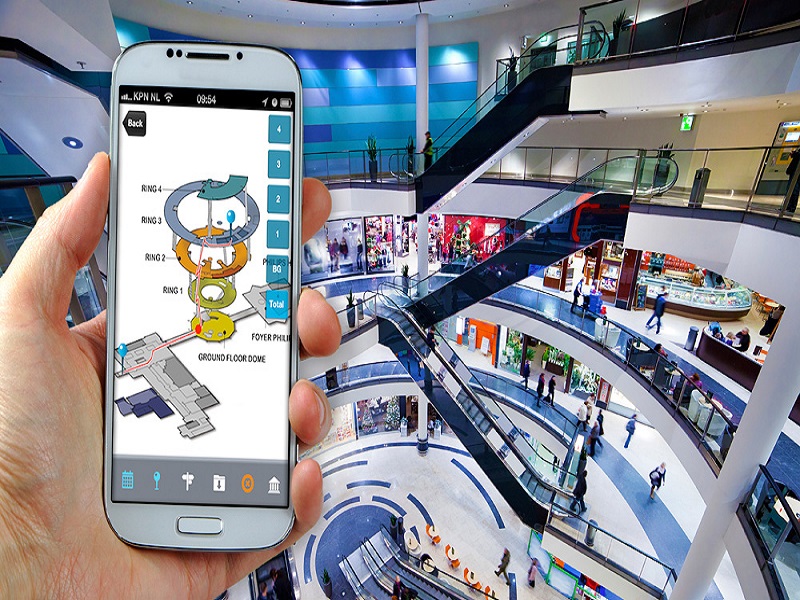
Wireless Positioning System